Занятие № 1. Движение робота. Повороты
Задание № 1. Движение по времени работы двигателей
Выберите пункт меню Файл - Новый проект. Сохраните проект, выбрав пункт меню Файл - Сохранить проект как… Выберите рабочий диск и укажите имя проекта - proj01.
Один проект может содержать несколько программ. Переименуйте программу, которая появляется после создания нового проекта, дважды щёлкнув по имени программы:
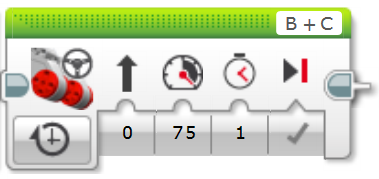
Для управления движением робота используем блок Рулевое управление. Режим работы влияет на условие остановки моторов - через заданное время, количество оборотов колеса, или угол поворота колеса. Параметр направление влияет на курс движения робота. Параметр мощность влияет на скорость вращения моторов. Робот начнёт двигаться назад при отрицательном значении параметра мощность.
Проверим, как мощность повлияет на расстояние, которое проедет робот при неизменном времени работы двигателей.
Составьте следующую программу. Направление движения - 0, Мощность - 20, Секунды - 1:
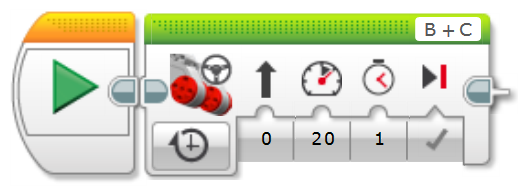
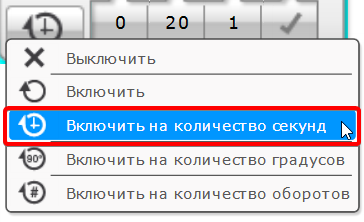
Убедитесь, что включен режим работы Включить на количество секунд:
Приблизительно измерьте расстояние, которое проехал робот. Повторите измерения для значения мощности 40, 60, 80. При неизменном времени движения с увеличением мощности преодолённое расстояние x увеличивается. Параметр Мощность напрямую влияет на x скорость робота.
Задание № 2. Движение по количеству оборотов колеса
Переключите блок Рулевое управление в режим Включить на количество оборотов. Измените существующую программу. Направление движения - 0, мощность - 20, обороты - 1:

Приблизительно измерьте расстояние, которое проехал робот. Повторите измерения для значения мощности 40, 60, 80. При неизменном количестве оборотов колёс с увеличением мощности преодолённое расстояние x не меняется.
За один полный оборот колеса, робот проедет расстояние, равное длине окружности колеса \(L\).
Диаметр колеса \(d\) можно найти на шине. Например надпись 56 x 28, означает, что диаметр равен 56 мм, а ширина колеса - 28 мм.
За основу вычислений возьмём колесо диаметром \(d=56\ мм\) (или \(5,6\ см\)). Длина окружности \(L\) такого колеса равна x см. Значение \(L\) понадобится для дальнейших вычислений.
ПредупреждениеРазмерность величин
Во всех последующих заданиях вычисление длины будет проводить в сантиметрах.
Расчёт количества оборотов \(x\), необходимых для преодоления расстояния \(S\) следует из пропорции: \[ \frac{\class{len_l}{L}}{S}=\frac{1\ об.}{x\ об.} \] Итоговое количество оборотов \(x\) вычисляется по формуле: \[ x = \frac{S}{\class{len_l}{L}}=\frac{S}{\pi \cdot d} \tag{1}\] Например для того, чтобы робот проехал расстояние в 30 см, колёсам робота нужно сделать x оборотов (ответ с точностью до трёх знаков после запятой).
2.1 На старт, внимание, марш!
Задание № 3. Поворот одним двигателем
Один из способов осуществить поворот мобильного робота - включить один из двигателей, пока второй остаётся выключенным. Направление поворота будет зависеть от того, какой из двигателей включен.
Расстояние между центрами шин принято называть шириной колеи \(B\). Чтобы рассчитать длину дуги \(p\) при повороте робота на угол \(a\) используем следующую формулу: \[ \class{path_p}{p} = \frac{\pi \class{col_b}{B} \class{angle_a}{a}}{180} \] Уравнение 1 поможет рассчитать, сколько оборотов должно сделать колесо для поворота робота на угол \(a\): \[ x = \frac{\class{path_p}{p}}{\class{len_l}{L}}=\frac{\pi \class{col_b}{B} \class{angle_a}{a}}{180 \class{len_l}{L}} \] Так как длина окружности \(L = \pi d\), получаем итоговую формулу расчёта количества оборотов колеса с диаметром \(d\) для поворота робота с помощью одного двигателя на угол \(a\): \[ x = \frac{\class{col_b}{B}\cdot \class{angle_a}{a}}{180\cdot d} \tag{2}\] Например, если ширина колеи равна 15 см, а диаметр колеса - 5,6 см, то для поворота одним двигателем на угол 90 градусов, колесу нужно сделать x оборотов.
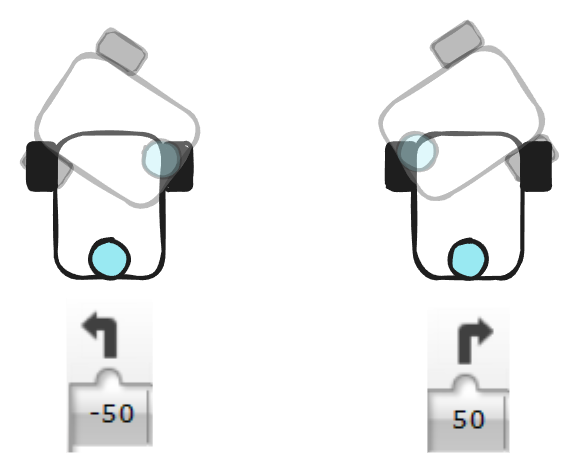
Чтобы повернуть одним двигателем с помощью блока Рулевое управление, параметру Рулевое управление нужно задать значение 50 для поворота направо, и -50 для поворота налево:
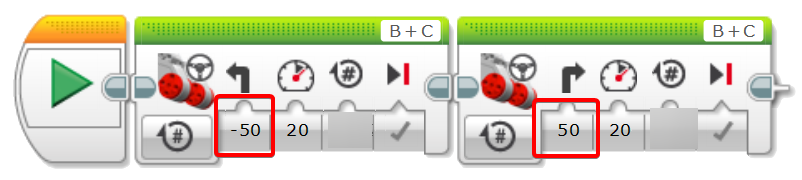
Составьте следующую программу, чтобы проверить правильность своих вычислений. Робот должен повернуть на 90 градусов налево, а затем направо. Впишите в блоки вычисленное выше количество поворотов колеса:
Убедитесь, что сначала робот повернул на 90 градусов налево, а затем на 90 градусов направо.
3.1 Робот-сторож
Создайте программу с помощью которой робот объедет территорию по периметру и финиширует в точке старта. Поворачивайте одним двигателем. Размеры участка - 42 x 42 см.
Чтобы проехать 42 см, колёса робота должны сделать x оборота (в ответе три знака после запятой). Для вычислений используйте Уравнение 1 и Уравнение 2.
Задание № 4. Поворот на месте
Для поворота на месте, робот использует оба двигателя. Двигатели вращаются в противоположных направлениях.
Расчёт нужного количества оборотов колеса для поворота на месте происходит следующим образом. Теперь точка поворота платформы лежит в середине оси вращения двигателей и делит ширину колеи \(B\) пополам.
Наибольшую длину дуги окружности, которую опишет одно из колёс рассчитаем по формуле: \[ \class{path_p}{p} = \frac{\pi \class{col_b}{B} \class{angle_a}{a}}{2 \cdot 180}= \frac{\pi \class{col_b}{B} \class{angle_a}{a}}{360} \] Используя Уравнение 1, получим: \[ x = \frac{\class{path_p}{p}}{\class{len_l}{L}}=\frac{\class{col_b}{B}\cdot \class{angle_a}{a}}{360\cdot d} \tag{3}\] Например, чтобы робот с шириной колеи в 15 см и диаметром колеса 5,6 см повернул на месте на 90 градусов, колеса должны сделать x оборотов.
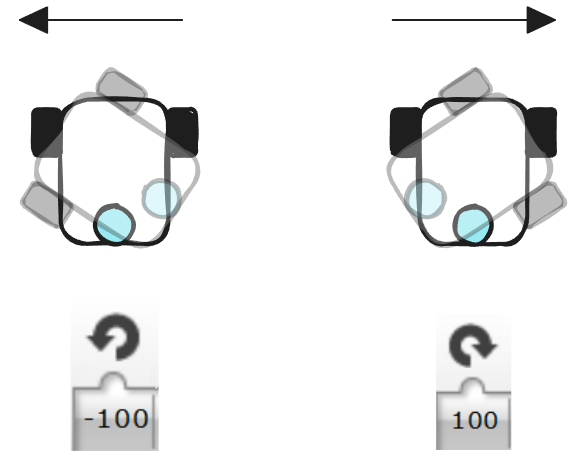
Чтобы повернуть на месте с помощью блока Рулевое управление, параметру Рулевое управление нужно задать значение 100 для поворота направо, и -100 для поворота налево:
Составьте следующую программу, чтобы проверить правильность своих вычислений. Робот должен проехать прямо 30 см, повернуть направо на 90 градусов и проехать ещё 30 см. Количество оборотов колёс подставьте самостоятельно исходя из уже вычисленных значений:

4.1 Робот-курьер
Робот везёт заказ, останавливается в точке назначения, разворачивается и возвращается в стартовую точку и снова разворачивается на 180 градусов. Используйте повороты на месте.
Расстояние между стартом и финишем - 50 см. Чтобы проехать это расстояние, колёса робота должны сделать x оборота (в ответе три знака после запятой). Чтобы робот развернулся на месте на 180 градусов, колёсам нужно сделать x оборота (в ответе три знака после запятой). Для расчётов используйте Уравнение 1 и Уравнение 3.