Занятие № 3. Биполярный транзистор. Программное управление двигателем постоянного тока.
По окончании занятия учащиеся смогут…
- объяснить назначение биполярного транзистора;
- объяснить, для чего H-мост;
- составлять программы, которые управляют направлением и скоростью вращения двигателя постоянного тока;
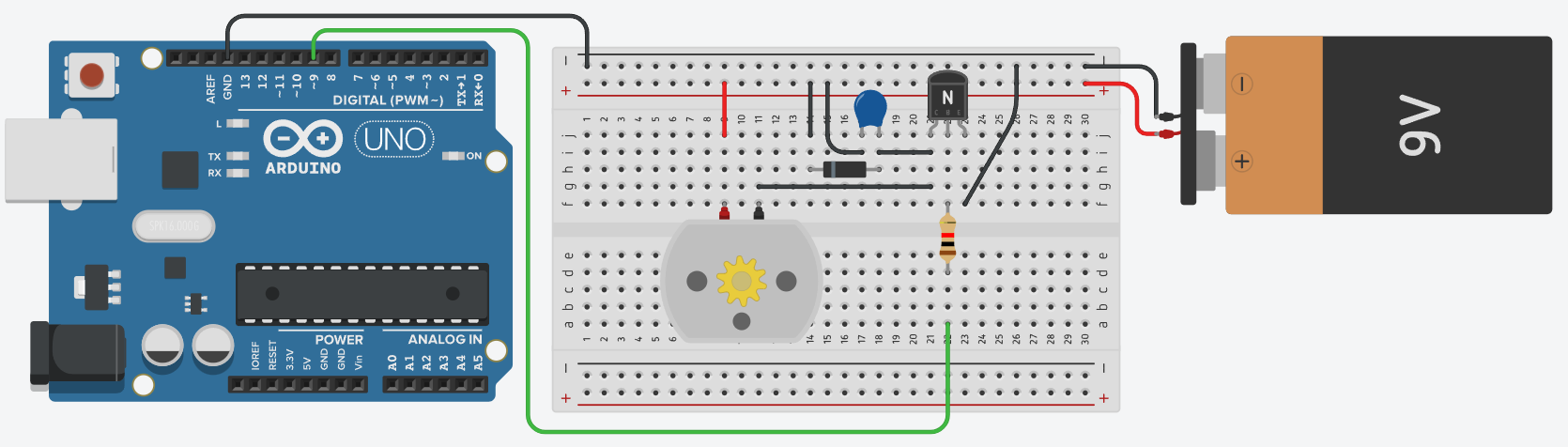
Задание № 1. Управление двигателем с помощью биполярного транзистора
Соберите схему для управления двигателем постоянного тока с помощью биполярного транзистора.
Схема для сборки
Программа
Задание № 2. Управление количеством оборотов с помощью ШИМ-сигнала
Схема для сборка остаётся без изменений.
Программа
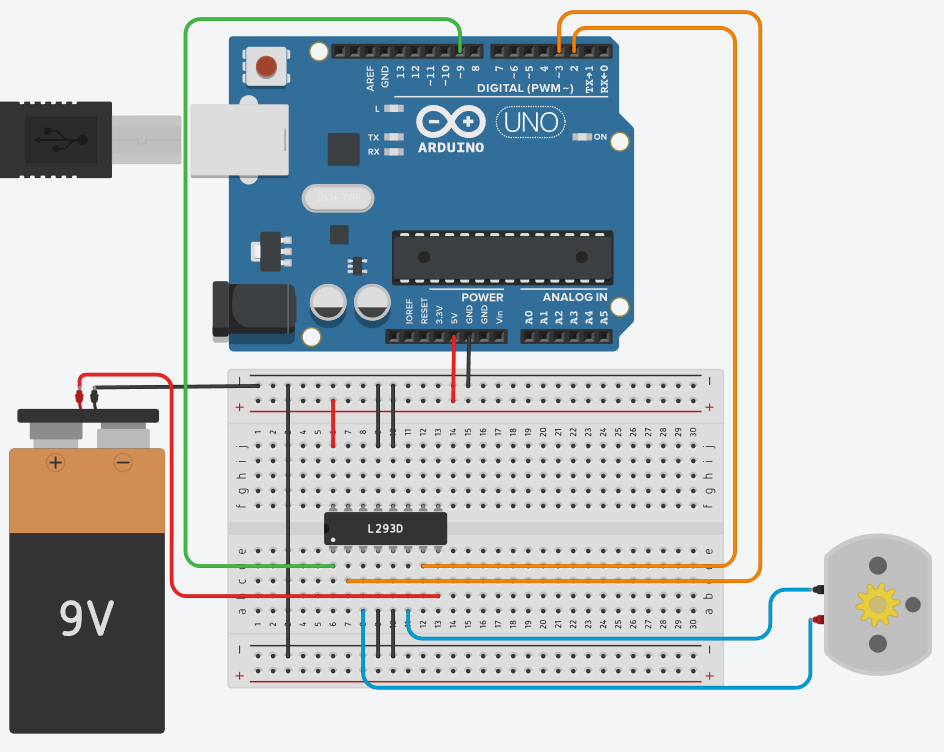
Задание № 3. Управление мотором с помощью H-моста
Используем драйвер мотора L293D для управления направлением и скоростью вращения мотора.
Схема
Программа
const int EN=9;
const int MC1=3;
const int MC2=2;
const int POT=0;
void setup()
{
pinMode(EN, OUTPUT);
pinMode(MC1, OUTPUT);
pinMode(MC2, OUTPUT);
brake();
}
void loop()
{
brake();
delay(2000);
forward(255);
delay(1000);
forward(127);
delay(1000);
reverse(127);
delay(2000);
}
void forward (int rate)
{
digitalWrite(EN, LOW);
digitalWrite(MC1, HIGH);
digitalWrite(MC2, LOW);
analogWrite(EN, rate);
}
void reverse (int rate)
{
digitalWrite(EN, LOW);
digitalWrite(MC1, LOW);
digitalWrite(MC2, HIGH);
analogWrite(EN, rate);
}
void brake ()
{
digitalWrite(EN, LOW);
digitalWrite(MC1, LOW);
digitalWrite(MC2, LOW);
digitalWrite(EN, HIGH);
}Задание для самостоятельной работы
К схеме задания 3 добавьте потенциометр для управления скоростью вращения двигателя.